
MINAS A6BU Servoantriebsregler
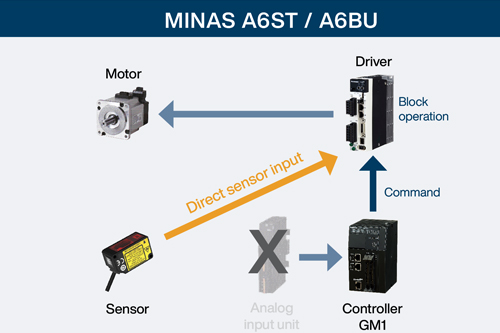
Echtzeitregelung mit dem MINAS A6BU durch direktes Verarbeiten von Sensordaten im Antriebsregler
Wenn es in der industriellen Automatisierung um das schnelle Verarbeiten von Sensormessdaten geht, kann jede Millisekunde zu viel sein.
Hochgenaue Applikationen im Bereich der Abstandsüberwachung erfordern schnellstmögliches Regeln der Achse durch den Servoantriebsregler. Die Reaktionszeit des Servo Drivers auf Sensormessdaten hängt maßgeblich von der Zykluszeit der verwendeten Steuerung ab. Hier kann durch den Weg vom Sensor durch die Steuerung zum Antriebsregler wertvolle Zeit verloren gehen.
An den MINAS A6BU können Sie Sensoren direkt anschließen und die analogen Daten dadurch ohne zwischengeschaltete Steuerung direkt im Antriebsregler verarbeiten. Der Motor kann somit unmittelbar den SOLL-Abstand wieder herstellen. Für die einfache Integration und herstellerübergreifende Kommunikation nutzt der MINAS A6BU das EtherCAT-Protokoll.
Schnell, genau und einfach
Auch Ihre Applikation kann von der direkten Verarbeitung der Sensordaten profitieren:
- Keine analoges Eingabemodul nötig
- Vereinfachte Systemkonfiguration und leichtere Programmierung
- Reduzierte Signalübertragungszeit
- Höhere Genauigkeit
- Feine Regelung
- Weniger fehleranfällig
- Weniger Ausschuss
Arbeitsweise und Systemkonfiguration


Mögliche Applikationen
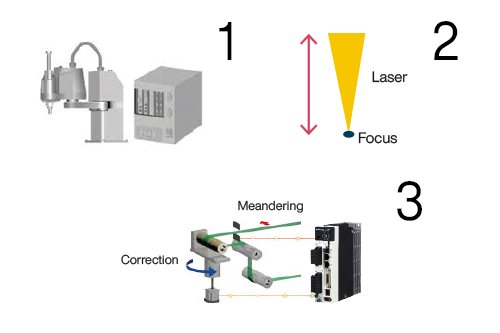
- Dispenser
Abstandskontrolle des Dosierkopfs zum Werkstück durch akkurate und schnelle Steuerung - Laserbearbeitungsmaschinen
Schnelles Korrigieren des Autofokus - Lithiumbatterie-Fertigung
Präzise Folienbandzuführung für höchste Qualität und wenig Ausschuss
Leistungsklassen
- 50W bis 400W, 1-phasig, 100V
- 100W bis 1,5kW, 1/3-phasig, 200V
- 2kW bis 22kW, 3-phasig, 200V
- 600W bis 5kW, 3-phasig, 400V





Technische Daten
| Encoder Feedback | 23-Bit (Auflösung 8388608P/U), 7-adriger serieller Absolut-Encoder | |
|---|---|---|
| Steuersignale | Eingänge | 10 |
| Ausgänge | 6 | |
| Analogsignale | Eingänge | 3 (16-Bit A/D x 1, 12-Bit A/D x 2), Anlegen von Druckmessgerätsignalen nur über den 16-Bit A/D-Eingang. |
| Ausgänge | 2 (Analogmonitor 1, Analogmonitor 2) | |
| Pulssignale | Ausgänge | 2 |
| Schnittstelle | EtherCAT | Echtzeitkommunikation für Befehlsübertragung, Parametereinstellung, Statusüberwachung usw. |
| USB | Anschluss an einen Computer zur Einstellung von Parametern oder zur Statusüberwachung usw. | |
| Steuermodus | Positions-, Drehzahl- und Drehmomentregelung | |