
Servocontrôleur MINAS A6BU
Contrôle en temps réel avec le MINAS A6BU grâce au traitement direct des données du capteur dans le servocontrôleur
Dans l’automatisme industriel, lorsque les données mesurées par le capteur doivent être traitées rapidement, chaque milliseconde compte.
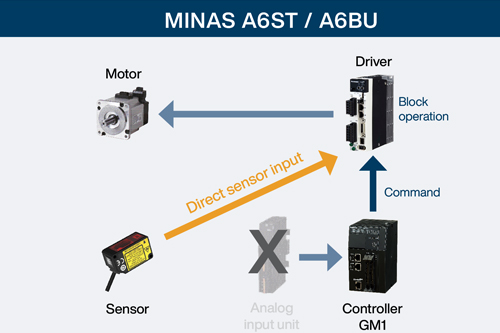
Pour les applications de supervision des distances haute précision, l’axe doit être contrôlé le plus rapidement possible par le servocontrôleur. Son temps de réponse aux données mesurées par le capteur dépend en grande partie du temps de cycle de l’automate utilisé. Un temps considérable peut être perdu entre le capteur et le servocontrôleur en passant par l’automate.
En revanche, le MINAS A6BU permet de connecter le capteur directement. Vous n’avez pas besoin d’automate, les données analogiques sont traitées dans le servocontrôleur. Le moteur peut ainsi réagir immédiatement et rétablir la distance de consigne. Le MINAS A6BU utilise le protocole EtherCAT facilitant l’intégration et la communication quel que soit le fabricant.
Rapide, simple et précis
Votre application peut également bénéficier du traitement direct des données du capteur :
- Module d’entrées analogiques superflu
- Configuration du système et programmation simplifiées
- Temps de transmission des signaux réduit
- Haute précision
- Contrôle fluide
- Risque d’erreur réduit
- Moins de pertes
Mode de fonctionnement et configuration du système


Applications possibles
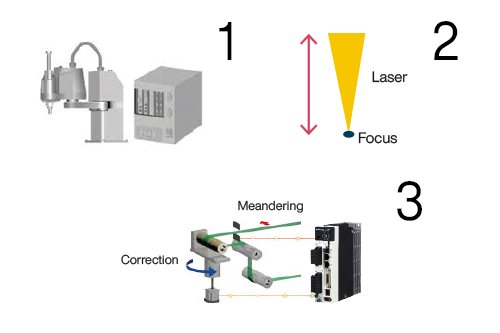
- Distributeur
Contrôle rapide et précis de l’espace entre le distributeur et la pièce de travail - Système de soudage laser
Correction rapide de la mise au point automatique - Fabrication de piles au lithium
Alimentation précise de bandes pour une qualité optimale et une réduction des pertes
Classes de puissances
- 50W to 400W, 1-phase, 100V
- 100W to 1.5kW, 1-/3-phase, 200V
- 2kW to 22kW, 3-phase, 200V
- 600W to 5kW, 3-phase, 400V





Spécifications
| Retour codeur | 23 bits (résolution de 8388608 impulsions/tr), codeur absolu série 7 fils | |
|---|---|---|
| Signaux de contrôle | Entrées | 10 |
| Sorties | 6 | |
| Signaux analogiques | Entrées | 3 (16 bits A/D x 1, 12 bits A/D x 2), entrée capteur de pression uniquement via l’entrée A/D 16 bits. |
| Sorties | 2 (supervision analogique 1, supervision analogique 2) | |
| Signaux d’impulsions | Sorties | 2 |
| Interface | EtherCAT | Communication en temps réel pour la transmission des commandes, la configuration des paramètres, la supervision de l’état, etc. |
| USB | Connexion à un ordinateur pour la configuration des paramètres ou la supervision de l’état, etc. | |
| Mode de contrôle | Contrôle de position, de la vitesse de rotation, du couple | |